
Ornithoptermodel EV8
Inhoud:


- eerste glijvlucht
- spanwijdte
- gewicht
- vleugeloppervlak
- vleugelbelasting
- vleugelslankheid
- armvleugelprofiel
- profiel van de vleugeltip
- slaghoek
- slagperiode
- neiging van de slaglijn
- 2000
- 2,8 m
- 3,6 kg
- 0,61 qm
- 5,9 kg/qm
- 11,7
- S1020
- E203 (13,6)
- 60 Graden
- 0,66 s
- 6 Graden
1. Vervaardiging van de romp

De positieve mal van de romp
Voor een precieze bevestiging
van de mechanische - en vleugelbevestiging wordt vanaf het begin de
positie van de spanten en de vleugelslagassen vastgelegd.
Aan het schouderstuk worden rechts en links nog de gedraaide
profielspindelhelften aangepast.
Gereed gekomen positieve rompvorm
met de negatieve vormen van de afsluitplaten van de romp.
Voor het bevestigen van de staart wordt later achterin de romp een conische
buis gestoken.
De negatieve mal van de romp
De negatieve mal en de romp zelf worden op de gebruikelijke GFK-bouwwijze
vervaardigd.

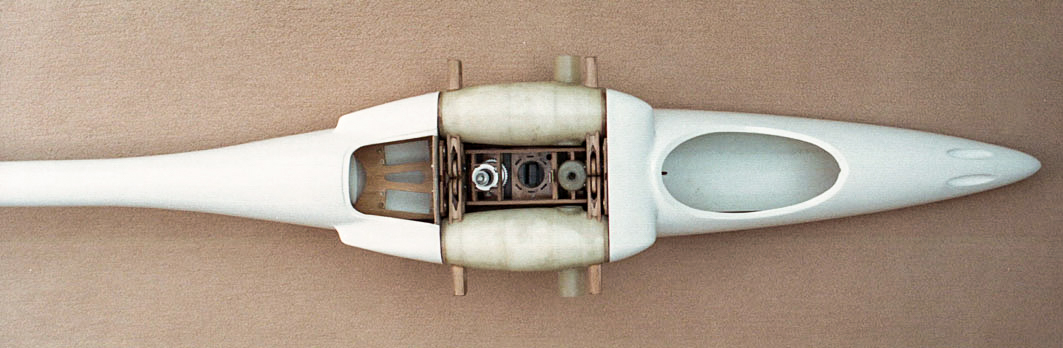
Rompversterking
Zonder vleugelaansluitwalsrollen is in het zijaanzicht van de romp de diepe
insnijding in de rompcontour duidelijk te herkennen.
Ter versterking in dit gebied wordt tezamen met
de hoofdspanten zowel links als rechts en sterke CFK-buis geplaatst.Deze buizen
lopen van voren naar achteren zeer slank langs de rompwand. De romp krijgt daardoor
een grote torsiestijfheid. He middendeel is hier klaar voor het plaatsen van
het chassis met het aandrijfmechanisme.
De romp is gereed
- Lengte
- max. doorsnede
- Gewicht*
*zonder bewegelijke aanbouwdelen
- 1,47 m
- 125 mm
- 600 g

Vergelijking van de afmeting
Wegens zijn kleinere aandrijfmechanisme kon
de EV8 met een relatief slankere romp uitgevoerd
worden. Het model heeft daardoor een lager totaalgewicht en is gemakkelijker
te hanteren.
- Afbeelding
- Model
- romp ømax.
- links
- EV8
- 125 mm
- rechts
- EV7
- 150 mm

Komplete romp
Het maken van de romp is relatief arbeidsintensief.
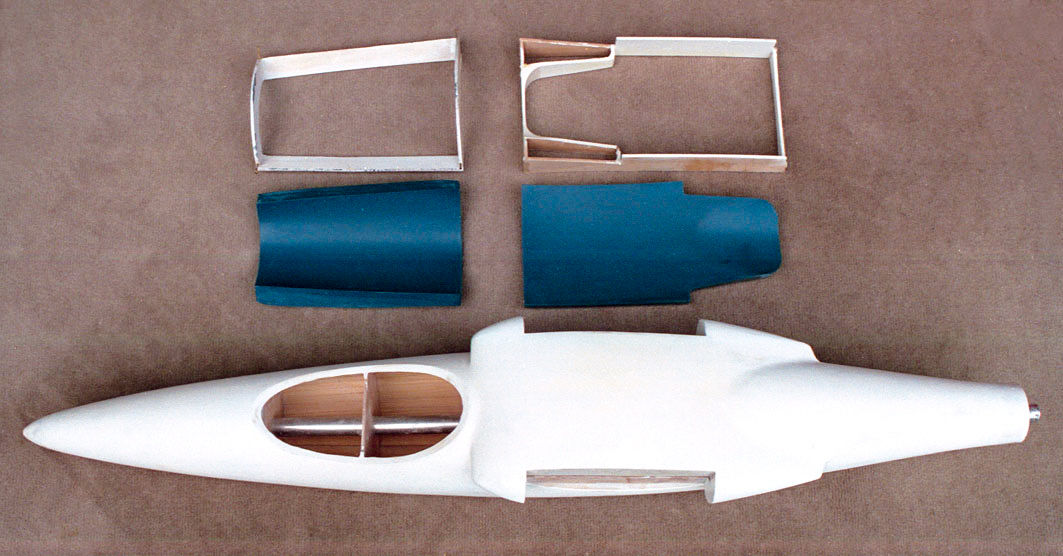
1.1 Vleugelaansluitrollen
De vervaardiging begint met de eindschijven van triplex en de het in lagen leggen van de hardschuimdelen die aangepast zijn aan de latere uitsparingen. Vanwege hun nauwkeurige uitlijning worden profiellatten toegepast.

Ruwe hardschuimdelen
gereed om te bewerken
Bewerkte hardschuimrollen
Gereedliggende vleugelaansluitrollen
Het hardschuim is met een ca. 0,5 mm dikke laag GFK bedekt. De randen van
uitsparingen worden later nog iets versterkt.
Wanneer de rol inclusief de getoonde inbouwdelen gereed is, bedraagt het gewicht
ca. 100 gram.
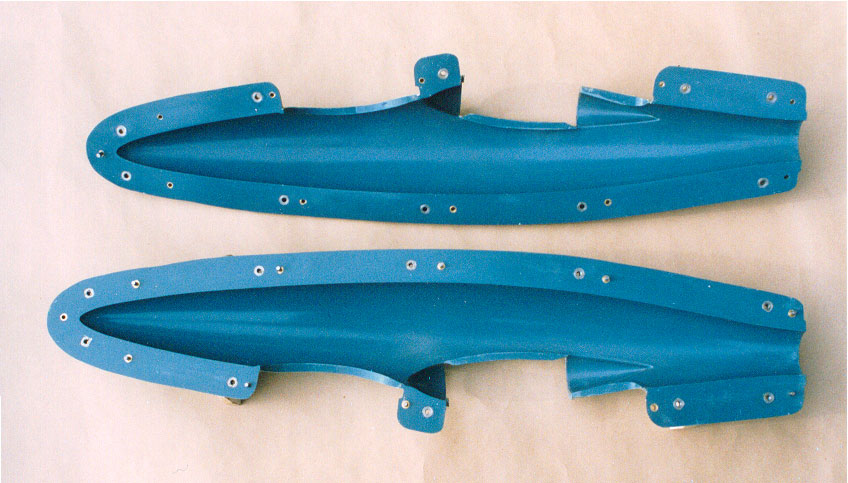
1.2 Romp vleugelovergangen

Bedekking van de vleugelovergangen
Ook voor de overgang van een symmetrisch profiel van de vleugelaansluitrol
naar een gewelfd vleugelprofiel is een mal noodzakelijk.
Romp-vleugelovergang zonder stromingsgunstige bespanning.

Romp-vleugelovergang
Door de neiging van de slaglijn van ca. 6 graden, van boven(achterzijde)
naar onder(voorzijde), vertoont de romp-vleugelovergang een rechte achterlijst
(zie handboek, hoofdstuk 8.8).
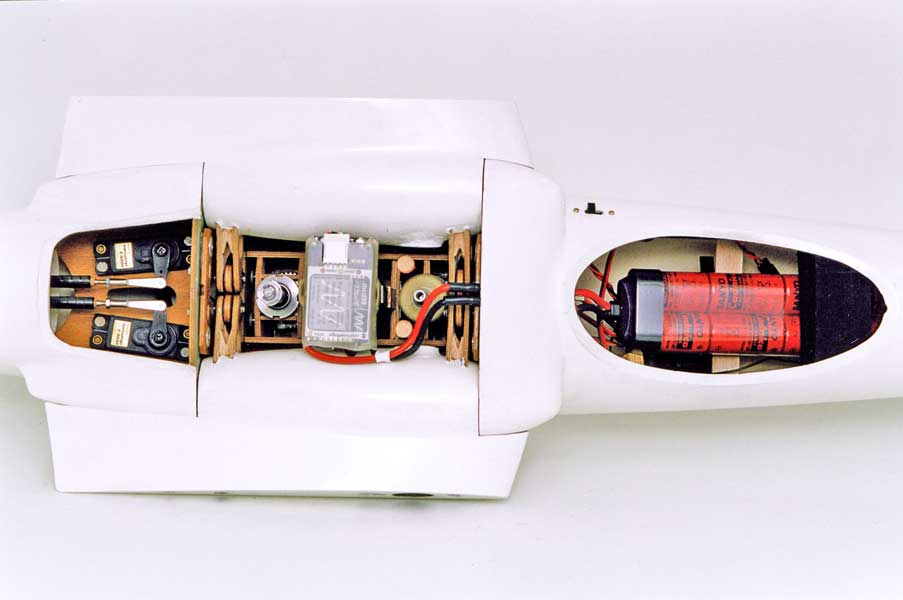
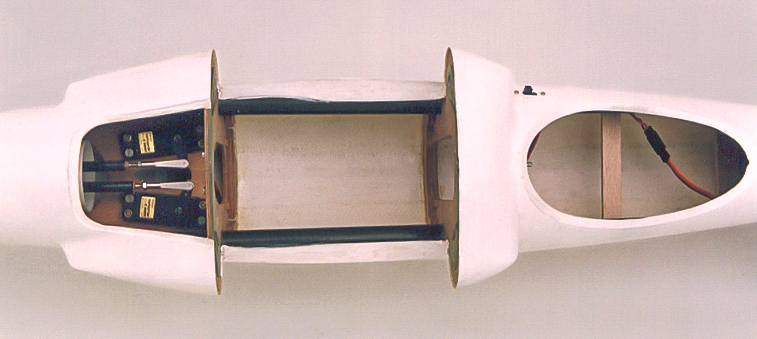
Een kijkje in de rompopeningen
Door de concentratie van het mechanisme tussen de vleugels is er relatief
veel ruimte in het voorste rompdeel. De elektronische apparatuur is hier echte
nog niet kompleet aanwezig.
2. Regeling van de vliegsnelheid
Een modelvliegtuig, en speciaal een ornithopter tijdens de krachtvlucht, vliegt alleen binnen een vrij beperkt snelheidsbereik optimaal. Tijdens de glijvlucht werkt normaal gesproken het hoogteroer door een instelhoekverschil als automatische snelheidsregelaar. Door de radiosignalen en tijdens de krachtvlucht treden er desondanks in de praktijk aanzienlijke snelheidsverschillen op (zie Vluchtstabiliteit van de ornithopter bij de EV7).
Bij de EV8 moet een elektrische regelaar de instandhouding van de optimale krachtvlucht waarborgen. Deze moet bij het stijgen tijdens de krachtvlucht de stroomonderbreking wegens een te lage vliegsnelheid verhinderen. De neiging van de vliegbaan wordt dan alleen nog door de trekkracht c.q. de slagsnelheid beïnvloed. Meer of minder trekkracht leidt tot meer of minder stijgen. Een afstandsbediening van de hoogteroer is dan niet meer nodig in de krachtvlucht.
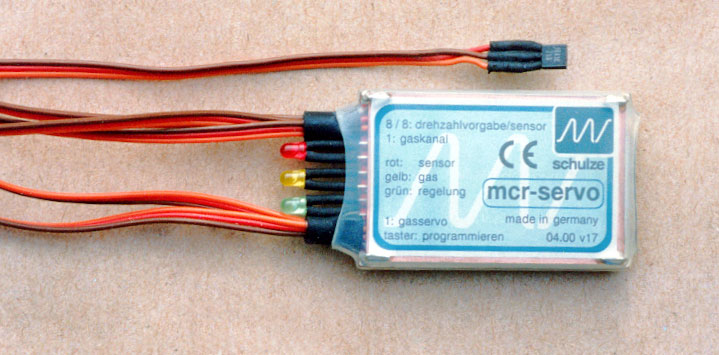
Regelaar
Deze toerenregelaar wordt bij helikopters met een verbrandingsmotor toegepast.
De regeleigenschappen hebben zich ook in de hier toegepaste regelkring duidelijk
bewezen.

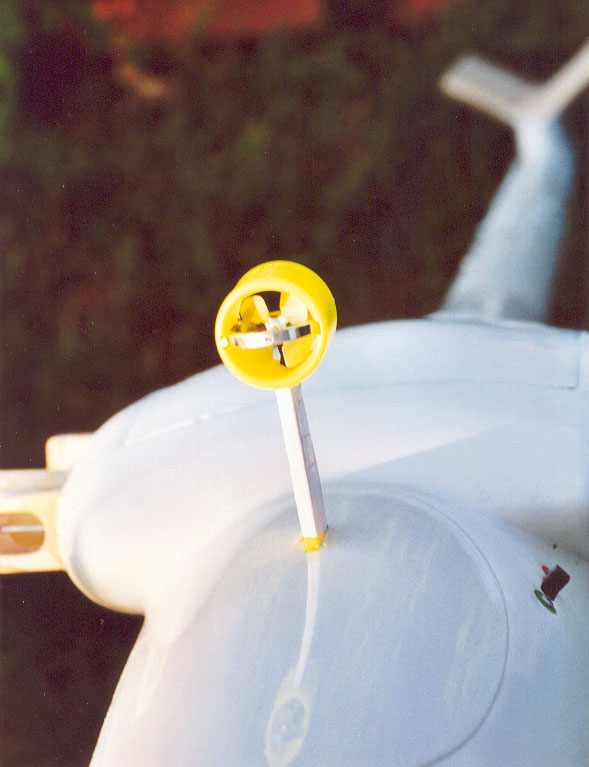
Sensor
Als snelheidsmeter wordt de schoepenradsensor uit een snelheidsmeter van
deltavliegers gebruikt. Deze is is ontwikkeld voor draadloze overdracht van
het toerental (Type Skywatch
, van Zwitsers fabrikaat). Hier wordt
door het schoepenrad een kleine magneet rondgedraaid.
Het toerental van de magneten wordt dan met de sensor van de heliregelaar
afgetast, die op die manier het rotortoerental meet.
Het gewenste toerental c.q. de gewenste vliegsnelheid laat zich via de regelaar door de afstandsbesturing instellen en daarmee externe invloeden wegregelen. Voor het testen wordt de schoepenradsensor met behulp van een magneet aan het eind van een elektromotoras bevestigd is op het gewenste toerental gebracht.

Phygoïde
De bij vrijwel iedere glijvlucht voorkomende langzame
schommeling van de vliegsnelheid (naar phygoïde
zie
externe link 1) kan met de elektrische regeling vermeden worden. Het model vliegt
zijn instelhoek alsof het langs een glijbaan beweegt.
Ook mislukte handstarts met aanvankelijk ongunstige glijhoeken vormen geen
probleem meer. Het model stelt zich direct in op de door de ingestelde snelheid
bepaalde glijhoek. Landen kan men echter het beste met een uitgeschakelde regelaar
uitvoeren.
2.1 Becker-roer


Ter verbetering van de hoogteroerwerking werd bij de EV8 de besturing op basis van het principe van een Becker-roer toegepast. Zoiets wordt in het bijzonder bij schepen gebruikt. Het verhoogt de manoeuvreerbaarheid.
Bij Becker-roeren worden de stuurvlakken en de klepuitslag met slechts één hendel synchroon bewogen. Het hoogteroer verandert daarbij de instelhoek en welving gelijktijdig. Op deze manier wordt de roerwerking groter dan bij slechts één van de twee veranderingen.
Bij ingeschakelde vliegsnelheidsregeling zijn kleine roeruitslagen meestal voldoende. Het voordeel van een Becker-roer komt daardoor hoofdzakelijk bij een uitgeschakelde regeling het beste tot uiting.
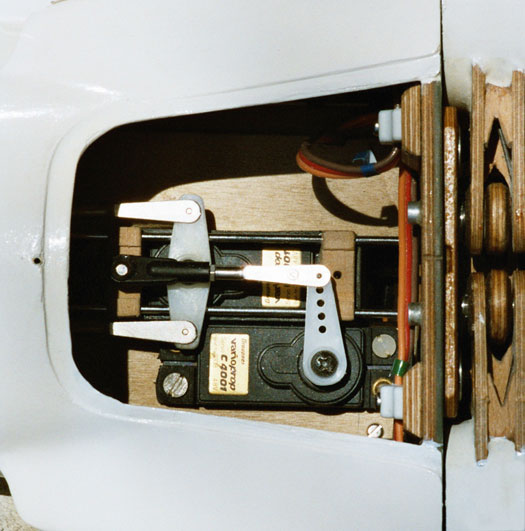
Mechanische mixer voor de V-staart
In plaats van de gasservo van de helimotor stuurt de regelaar in dit geval
de servo van het hoogteroer aan.
De bij de EV8 al voorhanden
zijnde V-staartbesturing moet dan met een mechanische mixer uitgerust worden.
Een T-staart was beter geweest.
3. Gewrichts-slagvleugel
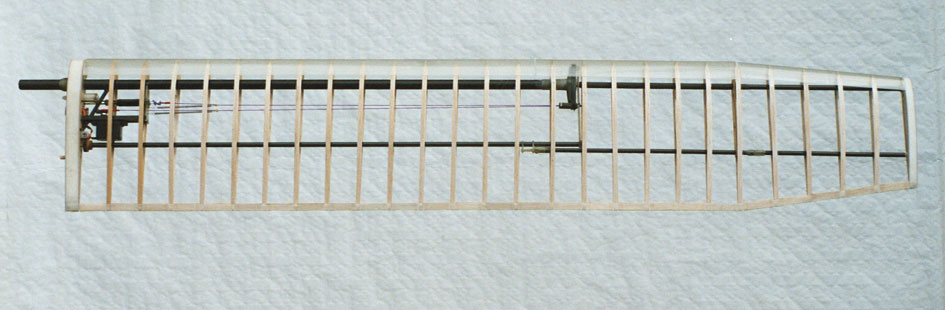

Door ervaring met de EV-modellen werd er een
reeks nieuwe slagvleugelconstructies ontwikkeld, waaruit de aëro-elastisch
gestuurde slagvleugel met gewrichten
van de EV8 is ontstaan.
Eerste glijvluchtpogingen
verliepen naar tevredenheid. Ook werden er hoogtestarts uitgevoerd.
De testen van de glijvlucht met de EV8 werden in 2003 met succes afgesloten. Bij de eerste slagvluchttest wilde het model door een bedieningsfout niet met vleugelslag vliegen. In plaats daarvan werd er een mislukte landing gemaakt waarbij de vleugelligger is gebroken.
4. Externe links
- Simulatie van de phygoide door Peter Rother:
http://www.aerodesign.de/peter/1998/phygosim.htm