
Kogelomloopspindel aandrijving
van het ornithoptermodel EV8
1. Components

Kogelomloopspindel
Voor het omzetten van een roterende naar een lineaire beweging wordt bij de
EV8 een kogelomloopspindel toegepast. Een overeenkomstige
techniek heeft Paul MacCready 1985 bij zijn vliegende sauriërmodel ON
toegepast (Details van zijn aandrijfprincipe zijn te zien in het ![]() krantenartikel over zijn project, in
het Duits).
krantenartikel over zijn project, in
het Duits).
Bij de hier gekozen afmetingen is daarin, op basis van één slagperiode, een overbrenging van 38:1 gebruikt. Het rendement voor de beide omkeerbewegingen bedraagt ca. 0,9. Deze uitstekende eigenschappen waren doorslaggevend voor de nieuwe ontwikkeling van de aandrijving. Voor iedere slagperiode is daardoor echter twee keer een omkering van draairichting van de motor benodigd. Dit proces komt overeen met de verandering van de draairichting van kleine servogestuurde ornithopters.
Aanwijzing:
In plaats van een kogelomloopspindel komt ook een kogelomkeersysteem
in aanmerking (zie externe link 1). De elektromotor
hoeft dan niet meer van draairichting te wisselen.
New development
If such a spindle drive to day will be designed by experts it could be very
compact and effective (zie externe link 2).

Compensatieveren
In plaats van de tot dusver bij de EV-modellen
gebruikelijke, oppompbare gasdrukveren met rolmembranen (zie aandrijfmechanisme
van de EV4), wordt bij de EV8
een industriële gasveer gebruikt. Bij dit model is de veerkracht helaas
niet instelbaar.
Bij grote veerkrachten en een korte veerweg bieden de gasveren een voordeel ten opzichte van stalen veren. Ze zijn kleiner en lichter maar hebben ook wel hogere verliezen.
Bij een goede energieterugvoer via de kogelomloopspindel en de motorregelaar
in de aandrijfaccu, kan deze zogenaamde compensatieveer
later weggelaten
worden.

Motor
In het begin van de ontwikkeling van EV8 werd vanwege
het relatief lage massatraagheidsmoment een borstelloze motor toegepast, toen
nog uitgevoerd met sensoren.
Na het gereedkomen van het model was er echter nog geen toerenregelaar met een voldoende korte vertragingstijd bij het omkeren van de draairichting beschikbaar. Het model moest daarom met een collectormotor uitgevoerd.
Nu bestaan er ook voor borstelloze motoren toerenregelaars voor een voldoende snelle omkering van de draairichting.
Elektronica
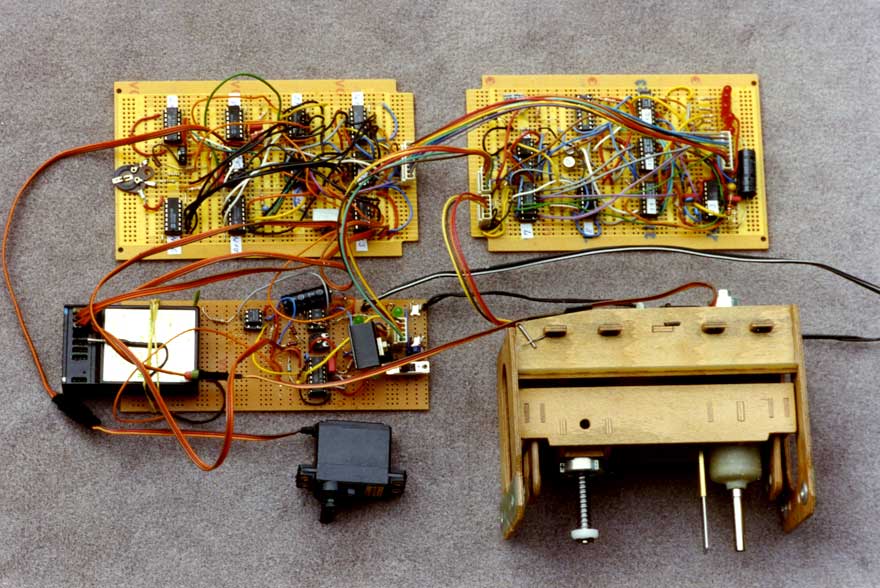
Ten tijde van het testen van de hiernaast staande testopstelling viel de beslissing
tot het toepassen van een Programmeerbare Logische Controller, ook wel PLC
of microcontroller genoemd. Wegens het gebrek aan programmeerkennis kon ik
in het begin slechts ongeveer de helft van de hardware door software vervangen
(zie het hiernaast staande logische schema).
-
- Download
BASIC-programma
(zip 8 KB)
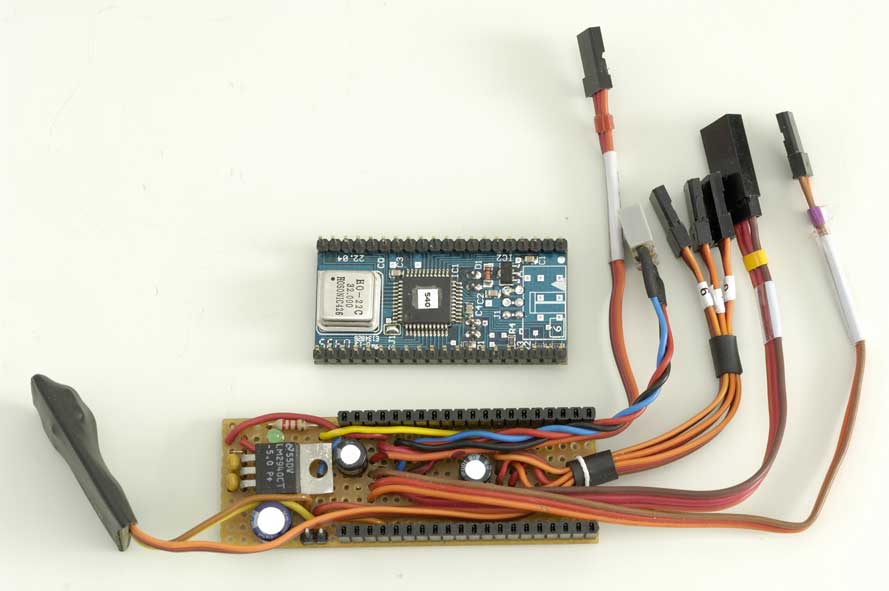
Intussen zijn de microcontrollers zo snel en en sterk geworden dat men zelfs met een eenvoudig BASIC-programma alles in één chip kan onderbrengen. Met de afgebelde stuurcomputer kan men aandrijvingen met slagfrequenties van 8 Hz aansturen.

Onderdelen van de aandrijving
Men ziet op de voorgrond de bij de EV-modellen
gebruikelijke Schommel
(triplexframe) voor de lastverdeling op de vleugelaansluitrollen.
Daarachter ligt het, voor de eerste keer t.b.v de EV8
bedachte chassis voor het mechanisme.
2. Aandrijfmechanisme

Chassis
met draadspil, veren en geleiding, echter nog zonder motor. Zo wordt het mogelijk
om de aandrijving als geheel inde romp te plaatsen of er uit te verwijderen.
De gasveer dien tevens als geleiding voor de stalen veer.

Vooraanzicht

Achteraanzicht
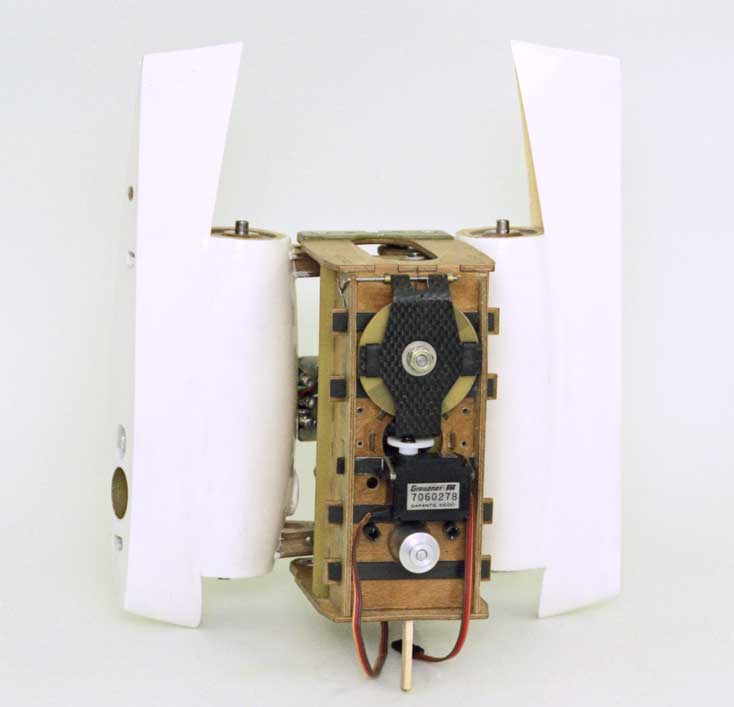

Onderaanzicht
Het hierboven afgebeelde remmechanisme werd al tijdens het testen van de glijvlucht
omgebouwd. De remkracht bleek voor hoogtestarts te gering.
Tegelijkertijd werd de daaraan gekoppelde digitale toerenteller door een analoge opnemer (potentiometer) vervangen.

Complete aandrijfeenheid
De aandrijving is als geheel relatief eenvoudig in de romp te plaatsen c.q.
uit de romp te verwijderen.
Gewicht 440 g (zonder vleugelaansluitrollen)
De gehele elektrische besturing is in de kop van de romp ondergebracht.
Constructie
e totale constructie van de EV8 is in CAD getekend.
Daardoor kon met een acceptabele hoeveelheid inspanning een heel compacte
constructie gerealiseerd worden.
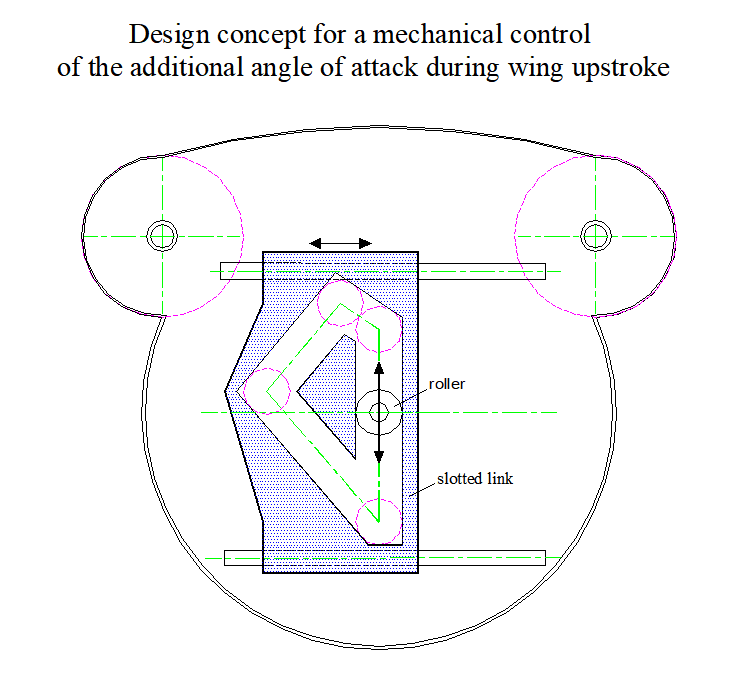
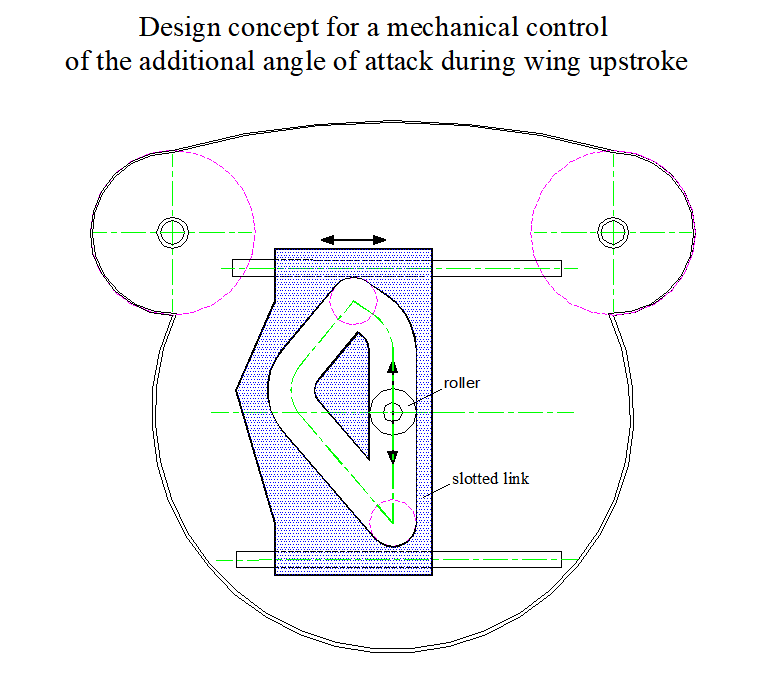
Controle van de invalshoek tijdens de opgaande vleugelslag
Ontwerpconcept voor een mechanische controle voor de extra invalshoek tijdens
de opgaande vleugelslag (beeld van de geleidingsbaan
met afgeronde hoeken, vanwege de inertie). The shape of the guideway corresponds
approximately t to the course of the angle of attack α in the paper Lift
during wing upstroke, versie 10.1, Fig. 21, in het
Engels, PDF 1.0 MB.
Towards the end of the downstroke, the lift decreases in the area of the wing tip. If the angle of attack increases near the wing root at the same time, so the arm wing takes over the lift from the hand wing in this way. This in birds enables a fast, self-acting reversal of the stroke motion of the arm wing and a matching, passive bending of the hand wing. So, in the lower stroke end position, the increase in angle of attack near the wing root is required for a well-functioning shift of lift. This important function is neglected in the calculation.
- The unit, consisting of the drive unit and the wing centre section (DW), is pivoted in the fuselage near the trailing edge of the wing, in such a way, that it can be turned upward for an additional angle of attack of the wing root (e.g. + 6 deg.).
- The roller moves up and down by the drive of the flapping wing.
- The lateral motion of the slotted link is used to control the additional angle of attack during wing upstroke. It must be converted into an up and down motion of the DW near the leading edge of the wing, either by a lever, a Bowden cable, or by a string.
- The lateral motion of the slotted link must be easy to move and cant-free in a guide which is fixed to the drive frame.
- In the area of the stroke end positions, the lateral motion of the slotted
link must be supported. When circulating the roller counterclockwise,
- near the upper final roller position to the left,
e.g. by a further slotted link with diagonally arranged guideway and a spring or by an angle lever-spring construction - near the lower final roller position to the right,
e. g. by use of the second slotted link mentioned above with diagonally arranged guideway and a spring.
- near the upper final roller position to the left,
- The DW should be pulled by a spring to the zero position of the angle of attack (against the lift force).
It can also be used to control other angles of attack directly on the wing from the drive.
The upstroke of the arm wing in a distance flight consists of a relatively fast upstroke motion, followed by a short waiting time at standstill in the upper stroke end position The ball screw drive is well suitable for this task.
3. Functiebeschrijving van de aandrijving
Bij toepassing van een aandrijving met een kogelomloopspindel moet bij iedere omkering van de vleugelslagrichting ook de motor van draairichting wisselen. Dat lijkt op het eerste gezicht nadelig. Als de omkering van de draairichting echter vergaand door mechanische krachten wordt bewerkstelligd dan blijven de motorverliezen daarbij binnen acceptabele grenzen.
Het voordeel van deze aandrijftechniek is dat er een relatief hoog rendement wordt gehaald in de buurt van het slagmidden.
Ook bij de tot nu toe gebruikte EV-mechanismen werkte de aandrijfmotor in het bereik van de eindstanden van de vleugelslag niet erg effectief (bij onbelast draaien).
3.1 Functiediagram
-
- Functiediagram
van het aandrijving

Bij de EV8 wordt de bewegingsomkering van de de aandrijvings- en vleugelmassa's hoofdzakelijk door mechanische c.q. aërodynamische krachten bewerkstelligd
- in de onderste vleugelstand door de liftkrachten op de vleugel en
- in de bovenste vleugelstand door een zogenaamde
eindstandveer
.
De tijdens de omsturing optredende elektromechanische motorkrachten zullen de omkering van de beweging slechts beperkt ondersteunen.
3.2 Omkering van de slagbeweging
3.2.1 Bewegingsomkering in de onderste vleugelstand
-

- Ruwe opbouw van de vleugel
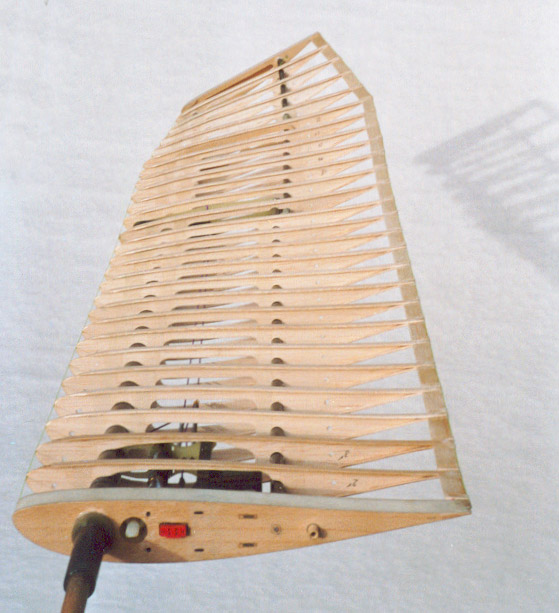
Het laddervormige slagvleugelsyteem zoals toegepast bij
de EV6 en EV7
is zo samengesteld dat het door zijn inwendige voorspanning altijd probeert om
de verdraaiingsinstelling van de opgaande slag in te nemen. Ter verduidelijking
van de inwendige voorspanning wordt het vleugelgeraamte in de hiernaast staande
afbeelding aan de achterkant gerangschikt. Deze voorspanning is voor de bewegingsomkering
in de onderste slagpositie belangrijk. De bewegingsomkering speelt zich ongeveer
als volgt af:
(Nummering als de punten in het functiediagram)
-
De motoromschakeling vindt plaats op het moment dat de vleugels het onderste positie vlak voor het omslagpunt bereiken. Door de vertragingstijd in de toerenteller werkt deze vervolgens als een uit-schakelaar.
De lift aan de vleugel is tegengesteld gericht aan de nog in gang zijnde neergaande slag. De bewogen massa's vertragen daardoor steeds meer. Ook de lift en de vleugelverdraaiing ijlen na.
-
Wanneer de neergaande slag in de onderste stand stopt, komt de vleugelverdraaiing overeen met die van de glijvluchtinstelling. Dit geldt ook voor de lift. Deze versnelt de vleugel nu weer in omhooggaande richting.
Ongeveer op hetzelfde moment begint motor weer elektrisch aan te lopen in de nieuwe draairichting. Nog steeds werkt deze grotendeels onbelast. Via de spindelaandrijving wordt de motorversnelling hoofdzakelijk door de vleugelkrachten veroorzaakt.
-
Met toenemende snelheid van de opgaande slag worden de liftkrachten allengs minder. De vleugel neemt meer en meer de maximale verdraaiing van de opgaande slag in. Deze wordt ongeveer vlak voor het bereiken van bovenste vleugelstand gerealiseerd.
De motor heeft nu het maximale toerental bereikt. Deze neemt nu met zijn elektromagnetische kracht de aandrijving van de verdere opgaande vleugelslag en het opspannen van de compensatieveer over.
Voor de volledige bewegingscyclus is het hoge rendement van de aandrijving met een kogelomloopspindel bij het omzetten van een roterende naar een lineaire beweging van grote betekenis.
De tijdens de beweging geleverde arbeid, ook die van de roterende delen, wordt hoofdzakelijk tijdens de opgaande slag door de liftkracht geleverd.
Tot de roterende delen van de aandrijving worden de draadspindel, de wielen van de tandriem, en de motor (rotor) gerekend. De draai-impuls is vanwege zijn hoog toerental aanzienlijk.
Men kan in de onderste vleugelstand de bewegingsomkering van de vleugel ook door een veer in eindpositie ondersteunen (zoals bij de tandheugelaandrijving). Voor de trekkrachtopwekking heeft het geen betekenis en voor de liftopwekking is het eerder nadelig.
3.2.2 Bewegingsomkering in de bovenste vleugelstand
-

- Stalen eindstandveer

In dit bereik neemt ter ondersteuning van de vleugellift
een zogenaamde stalen eindstandveer
de versnelling en
vertraging van de respectievelijke massa's over.De bewegingen voltrekken zich
zoals hier voor beschreven.
In de bovenste vleugelstand werkt de lift voortdurend tegen de bewegingsomkering in. De eindstandveer moet daarom ook deze kracht overwinnen. De dimensionering van de veer is hierop gebaseerd (veerkracht max. 976 N).
Bij een goed rendement tijdens het terugvoeren van de bewegingsenergie van de vleugelmassa's via de spindelaandrijving en de motorregelaar van de aandrijfaccu, kan deze eindstandveer (mogelijk) later ook wat lichter worden uitgevoerd.
De energiestroom van de oscillerende vleugelmassa's wordt in het Handboek, hoofdstuk 5.3 beschreven.
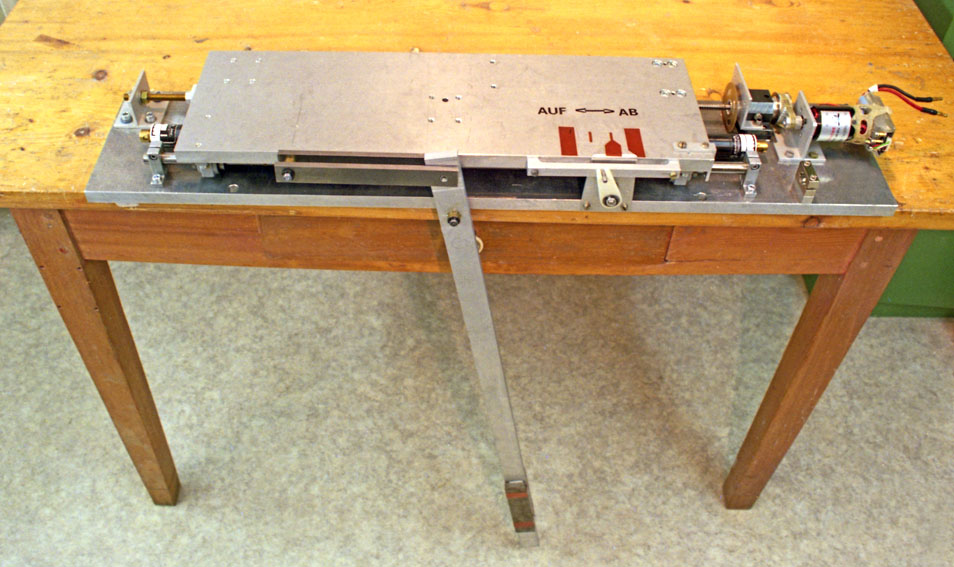
4. Testinstallatie
-


- Testinstallatie voor de aandrijving van het model EV8
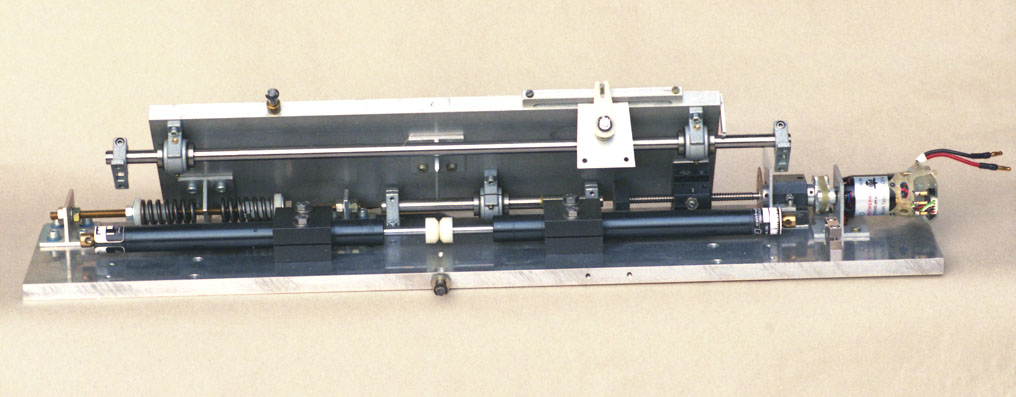
{kind=link}
Om de aandrijffuncties tijdens de samenwerking van elektronica en mechanismen te testen werd een testinstallatie gebouwd.
Het naar beneden hangend pendelgewicht heeft hetzelfde traagheidsmoment als de beide vleugelhelften. de aërodynamische krachten bij de op- en neergaande slag worden door instelbare dempingscilinders bij benadering gesimuleerd.
Er blijven toch nog wel wat vragen met betrekking de praktische krachtvluchttest onbeantwoord.
5. Externe Links
- Product data sheet
Ball Reverser Actuator
by the company Norco Inc. (USA):
http://www.motiontech.com.au/assets/pdf/Flennor Norco Ball Reverser Actuator 230712.pdf (0,2MB) - Lightweight, resilient high-performance power unit with high efficiency for
the elastic motion of a robot arm.
A New Prismatic Series Elastic Actuator with Compact Size and High Performance
by Nicholas Paine and Luis Sentis from The University of Texas at Austin, USA, 2012:
Video: https://www.youtube.com/watch?v=KaQ6lx3ifPU
Journal Publication:
http://www.me.utexas.edu/~lsentis/files/Prismatic-SEA-paine.pdf (3.8MB)