



Gait change of birds
Content:
1. Basic-gaits

Figure 1
Basic gaits with arrangement of forces in a flapping period and the corresponding
wing tip vortices. From the lift force L result the carry force C and the thrust
T (the image is partly based on works by J. Rayner, 1986 and G.R. Spedding,
1987, please look at externe link 1).
-
In the Ring-vortex gait the flapping wing is aerodynamically active only during the downstroke. Only in this stroke direction a lot of thrust and much carry force is generated. During upstroke the wing is leading up
empty
. On average of a whole stroke period are given mean thrust and mean carry force values. Because the momentum of lift of a whole stroke period must be generated only during the downstroke, a large wing depth is required for this (please look at chapter 4., Lift during wing upstroke, version 10.1, in het Engelse, PDF 1.0 MB). In particular small birds sometimes fold their wings almost completely together during the upstroke. The Ring-vortex gait is used in particular for slow flight. -
In the Ladder-vortex gait (Brodsky, A. K. and V. D. Ivanov, The role of vortices in insect flight. Zool. Zh. 63/1986), lift force is generated during up- and downstroke. During upstroke it is negative along the whole wing and positive during downstroke. On average, this results in a lot of thrust during a whole stroke period, but hardly in any load-bearing force. This is the way of flying especially of insects. In birds it is used in pure form only by hummingbirds in hovering flight (please also see aerodynamic phase shift under non-stationary flow conditions). It is also applicable to very light ornithopters with membrane wings.
-
In Continuous-vortex gait positive lift force of constant size is generated during downstroke and during upstroke.Thrust is achieved by shifting of lift along the wing half span. During downstroke the shifting happens in the direction of the wing tip and during upstroke in the direction of the wing root. In this way, the required thrust and an almost constant carrying force can be generated. The shift of lift between the arm and hand wings, which is essential for bird flight, is not taken into account in this image. The original image shows strongly different sizes of the lift vectors at upstroke and downstroke. This was probably done in the interest of displaying the thrust. However, a continuous vorticity requires a continuous lift (please see also Flying with approximately constant lif and the article Arrangements of wing tip vortices on flapping wings PDF 0.5 Mo).
The differences between the distinguished gaits are especially in the sign of the lift force during the wing upstroke. Between these basic flight principles for flapping wings there are various intermediate stages or mixtures. Based on the results of bird flight research an attempt is made here to describe lift and thrust forces and the function of the different gaits.
A change in the gait of a bird, for example between hover flight and level flight, is about comparable to the transition between the flight of a helicopter and that of a motor glider. Only tiltrotor aircrafts (e.g. tiltrotor V-22 Osprey) can approximately cope with this task.
The gait change of birds is also visible to the naked eye in the flight image or the motion sequence (pleease see Fig. 5 by Konrad Lorenz, 1933, in chapter 4).
The following descriptions are based on an average design of the bird. But in flapping flight everything depends on everything. Therefore, the size specifications of the described parameters are always relative and similar solutions in the close-up range are absolutely possible.
2. Take-off with transition to flying with lift
When purely flying with thrust the weight force of the bird will mainly be balanced by the upward directed thrust force. Let's assume the bird has already taken off from the ground. The stroke plane of the wings is approximated to the vertical up to about 60 degrees (please see Fig. 2). Flapping frequency and wing twisting are still very high. A level movement of the bird has started. However, the bird balances still further like a helicopter on its thrust jet (blast of air).


Figure 2
Forces short-time after take-off from the ground
A flapping wing generates particularly during strong thrust generation the oncoming flow to its stroke plane partly by itself. This works like the oncoming flow to the rotation plane of a propeller.
Size and direction of the resulting total inflow in the several flight situations resulted from the flight speed and the thrust jet generated by the flapping wing itself. Both speeds are specified for the respective gait type (estimated). The direction of the drag vector is assumed here in the direction of the total inflow. Its size is determined (total drag of wing and fuselage) in relation to the weight force. Together with the inclination of the stroke plane of the wing this results in all other forces (please see adjacent vector diagram).
The upward directed thrust generation can be relieved now and directed more forwards by further turning of the stroke plane. This in turn will lead to an increase of the flight speed, from which lift and thrust generation can benefit at the same time.
Because the bird is streamlined shaped the moment is coming when the directly generated lift is sufficient to carry the bird alone. The thrust then can be directed straight forward and can substantially be decreased together with the wing twisting (please see Fig. 3). The bird is now completely in flying with lift (please see Fig. 3). The wing upstroke now takes place automatically by aerodynamic forces. This is much more energy efficient than the previous way of flying.

Figure 3
Total forces of large birds when flying with lift in level flight
The large lift-to-drag ratio also enables good glide and sail characteristics.
But in practice, the transition to flying with lift is not as easy as it appears at first. Despite low airspeed thrust and lift must simultaneously assume relatively high values. With reserves of lift in the respective problem zones of the flapping wing, however, in birds a gait change is possible.

Figure 4
Total forces of birds in mid-size when flying with lift in level flight (e.g.
blackbird, pigeon, crow)
The lift-to-drag ratio is generally not quite as well as in large birds. However, there are various adaptations to the respective habitat. With this wing design the glide angle is usually only moderately good.
3. Flying with and without reserves of lift
If no reserves of lift are available it is hardly possible to change the way of flying. It is then better to start the flight directly by flying with lift. But in this case, starting only succeeds with a strong headwind, a long runway (e.g. swan, albatross), or from a heightened position. The ornithopter models EV4 to EV8 are examples for this.
-

- Staggering of the primaries
of a stork in gliding

Reserves of lift can primarily be obtained by large wing depth or other enlargements of the wing area (e.g. by spreading of feathers). Also, fore flaps, slots in the wing, and flaps are very effective. Variable profiles with a large working area of the lift coefficient expand the possibilities. And by pivoting of wing sections lift can be shifted from areas at risk of stall. For ornithopters, however, largely missing corresponding constructions.
During the flight reserves of lift can be used for more thrust for climb flight, a payload, and more flight speed. In cruise flight or gliding flight, they are more of a hindrance. Normally, they increase the drag. During gait change all reserves are fully utilised.
With big reserves of lift along the whole wing and good gliding properties flying with lift succeeds almost instantly after a hearty jump from a standing position, primarily with headwind.
4. Distance flight and cruise flight
It was only very late that I realized that when flying
with lift, a distinction must be made between distance flight and cruise flight.
An essential impulse for this was the very detailed, pictorial representation
of the gait change of birds by ![]() Konrad Lorenz (1933). His scheme (please see
Fig. 5) shows the two different flight modes for level flight. They are described
here for ornithopters that are flying with a large rate of advance (like especially
big birds).
Konrad Lorenz (1933). His scheme (please see
Fig. 5) shows the two different flight modes for level flight. They are described
here for ornithopters that are flying with a large rate of advance (like especially
big birds).

Figure 5
Scheme of the wing path line of a bird leaking out with marked upstroke forces
and a gait change to flying with lift at point c
, by ![]() K. Lorenz (1933).
K. Lorenz (1933).
In experiments with flow visualization G. R. Spedding (general, 1982, 1984,
1986, 1987) was able to prove the change of gait in birds (see to this the
external link 1.). I suppose so, in particular,
Jeremy Rayner (1986) then introduced the term gait change
(see his
article Vertebrate flapping flight mechanics and aerodynamics and the Evolution
of flight in bats
in ![]() Nachtigall W. 1986, BIONA-report 5).
Nachtigall W. 1986, BIONA-report 5).
At the take-off the bird shakes some strokes of the wings diagonally upwards after
the jump. Shortly after the gait change to flying with lift the lift is still
relatively small during upstroke. Therefore, the downstroke must generate correspondingly
more lift. This is achieved by high stroke speed with relatively small wing twisting.
According to this the bird is working with fluctuating lift. During upstroke the
hand wing is still bended clearly visible downwards. Furthermore, shortly after
take-off in birds, at least in the larger ones, the legs are not fully stretched
to the rear and the body is not yet completely in the flight direction (![]() R. Demoll 1930).
R. Demoll 1930).
K. Lorenz called this way of flaying Rüttelflug
(about like shake-flight)
just like the previous one during take-off. There's some justification for that.
The body of the bird is accelerated further crosswise to the flight direction.
In level flight, however, up and down and not as strong as before. Here, however,
the inequality of the flight situation in the designation of the way of flying
should be made recognizable. Perhaps the term short-distance flight
would
be appropriate. Small birds in particular, however, probably travel relatively
large distances in this way. The term long-distance flight
or cross-country
flight
, on the other hand, are roughly equivalent in meaning to the term cruise
flight
and therefore also inappropriate. The flight mode therefore is named
distance flight
here.
If the lift during upstroke is smaller and during downstroke larger, then thrust is generated. This effect adds to the thrust generation by lift shift. In distance flight with fluctuating lift, as in the take-off phase, for example, one can therefore assume strong thrust generation.
However, this designation distance flight
shall always apply here when the
hand wings are strongly bent downward during the wing upstroke, thus also with
constant lift. Strong downward bent hand wings are always a sign of increased
thrust requirement. At very high thrust requirements, lift will fluctuate.
Birds certainly can change continuously from a flight mode with bent hand wing
to a flight mode with hand wings barely bent downward. It is used in energy-saving
horizontal flight and is referred to here as cruise flight
.
Thereby, during the up- and downstroke of the wing happens only a shifting of
lift. According to K. Lorenz belong to this gait,
- a very slight, sometimes barely observable bending of the hand wing downwards during upstroke,
- a reduced flapping frequency compared to the distance flight,
- a somewhat smaller stroke angle than in distance flight,
- the end of the noises of flow through the primary feathers during upstroke, and
- a constant lift (meaning the carry force). An up and down swinging of the bird is no longer observable.
Flying with constant lift is very energy saving , especially that with hand wings barely bent downward. But a fast flight or a gently inclined climb flight are barely possible with it. The possibilities for increasing thrust are too limited. Also, an increase of the stroke frequency does not help much. This is because also the already relatively large working drag of the upstroke also increases in the same proportion as the thrust on downstroke. In level flight however, therewith long distances can be covered, e.g. in bird migration. Flying with hand wings barely bent downward with constant lift at the same time, is probably a kind of end point in the long history of the development of bird flight.
Already Konrad Lorenz has determined that, due to the behavior of the birds in bordered rooms, only very rarely the cruise flight is at all known and then also is recognized in investigations of the bird flight. Unfortunately, it is very difficult to investigate birds in the open air. Till today, there are hardly any research reports about cruise flight and about flying with constant lift or constant circulation.
When flying with lift, one should generally distinguish between distance flight and cruise flight. Unfortunately, I have not done that as yet (2019) and also not on this website. The essential characteristic of cruising flight is certainly an at least approximately constant carry force and the very slight downward bending of the hand wing during upstroke. In both flight modes, angling of the arm wing combined with pivoting of the hand wing backward is used during the wing upstroke, but only very slightly in cruise flight.

- Lift distributions at wing upstroke for the distance flight and for the cruise
flight.
The strong bending of the hand wing, which is part of the distance flight, is not yet considered here. Thereby, the lift distributions change considerably, especially in the hand wing area.

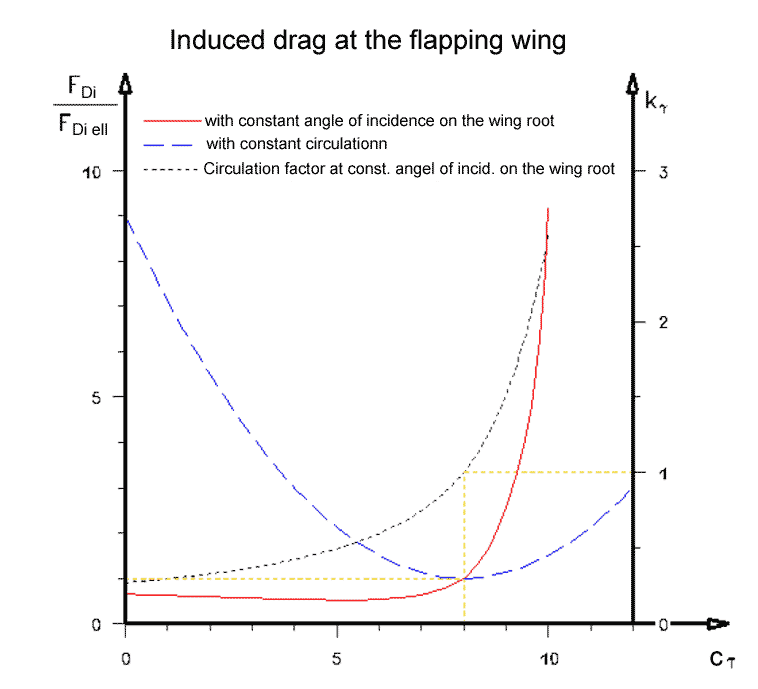
According to the differences between distance flight and cruise flight described
above, the lift distributions at upstroke can be classified as follows. The boundary
area lies approximately at the distribution parameter respectively circulation-characteristic-number
(c-Gamma) c_Γ = 5. Values between 5 and 6 apply for the cruise
flight and smaller values for the distance flight (the circulation distribution
with c_Γ = 6 corresponds to the circulation distribution c
by ![]() L. Prandtl with the lowest induced drag).
Only with the latter, particularly because of the connected winglet effect, the
hand wing should be bent. This reduces the flow along the wing and thus the induced
drag. Because large negative lift and positive lift are close together here. This
is especially true when increasing the lift, up to flapping flight with constant
lift (please see diagram Induced Drag
with constant circulation from the site Handbook).
The negative lift in the hand wing area can be largely avoided by suitable bending
of the hand wing (please see Wrist for a strong
passive bending of the hand wing).
L. Prandtl with the lowest induced drag).
Only with the latter, particularly because of the connected winglet effect, the
hand wing should be bent. This reduces the flow along the wing and thus the induced
drag. Because large negative lift and positive lift are close together here. This
is especially true when increasing the lift, up to flapping flight with constant
lift (please see diagram Induced Drag
with constant circulation from the site Handbook).
The negative lift in the hand wing area can be largely avoided by suitable bending
of the hand wing (please see Wrist for a strong
passive bending of the hand wing).
According to K. Lorenz, the stroke speed decreases during the transition from distance flight to cruise flight. At the same time the bending of the hand wing disappears. This correlation corresponds very well to the function of the passive bending of the hand wing like it is described for the articulated flapping wing in the chapter 7.2 Pivoting of the wrist axis.
The article Flapping wings with and without wing turning, in German, PDF 0.9 MB also contains calculation examples which in a first approximation emulate the conditions of the cruise flight. In examples 10 and 12 can be seen the tendency towards small wing power. However, the included very short length of the stroke period compared to the distance flight in the calculation examples 1 to 4 does not match to the change in flapping frequency, described by K. Lorenz. However, the discrepancy can be easily resolved in the calculation model. One only has to shorten the given duration of the flapping period for distance flight.
On the other hand, a reduction in the upstroke duration during cruise flight because of the larger upstroke moment of the lift seems quite plausible. This affects the length of the whole stroke period. However, birds may use a smaller time ratio (k_t) of upstroke/downstroke during cruise flight. A corresponding experiment in calculation example 10 with k_t = 0.5 led to a slightly longer length of run, but not to the expected extension of the stroke period. Bur, the increase in circulation at downstroke in calculation example 10a extends the stroke period slightly.
The short length of the stroke period in cruise flight is due to the small difference between the circulation distributions of up- and downstroke. This is especially true when the wing root is turned (see calculation example 12). The possibilities for sufficient thrust generation without high flapping frequency are very small. However, observations of bird migration with a radar show that in cruise flight the flapping frequencies are smaller than in distance flight (please look at e.g. in German, related link 2).
If the lift is kept constant in cruising flight, it is also relatively high during upstroke. Thereby, the pressure point of the lift distribution lies quite far out. The stroke moment of the wing and thus the energy is correspondingly high, that has to be processed during upstroke. However, the wing area with negative lift near the wing tip is very small in cruising flight, if it exists at all (please see example Stork by Otto Lilienthal). In any case, the thrust generation that takes place there is not sufficient to absorb the whole energy that is applied with the mainly positive lift. In an ornithopter, the upstroke energy can be easily stored in a compensation spring. It can then be reused during the following downstroke (please look at Lift during wing upstroke, version 10.1, PDF 1.0 MB).
But, how this works for birds in cruising flight is unknown. They can generate
a lot of lift in the two final stroke positions without much energy conversion.
But, in the time of upstroke in between, this is not possible without inhibiting
the stroke motion of the wing (no force without counterforce). One solution to
this problem may be, to reduce the lift in this meantime, so it's not kept quite
constant. This may also be a reason for the phase shifting of ift during upstroke,
described in the above-mentioned article. Or the birds use the whole upstroke
energy to accelerate the wing mass upwards. But this leads to an extremely short
duration of the upstroke motion. And somehow the whole kinetic energy in the upper
stroke end position then must be further processed by a kind of end position spring.
I consider it unlikely that the bird's slowdown the upstroke motion by muscle
power. Unless one of the three different muscle fibres of the great pectoral muscle
(please look at ![]() H. Oehme, 1968
H. Oehme, 1968 Physiological and morphological
aspects of muscle performance of flying animals
, in German) can assume the
characteristics of a tensioned rubber band without much muscle energy. This would
then also be helpful during gliding flight to maintain the stretched wing position.
The subdivision between distance flight and cruise flight also applies to the designing of ornithopters. For cruise flight the lift must be increased during upstroke in the mid-span. For this purpose is useful a turning of the wing root. With constant lift, however, the thrust that can be achieved is only sufficient, even for horizontal flight, if the drag of the ornithopter as a whole is very small. On the other hand, in distance flight respectively climb flight it is essential to increase the thrust. This can be achieved with a higher flapping frequency, a correspondingly larger wing twisting, and with the bending of the hand wing. The aerodynamic effects of these design measures for both gaits can also support each other.
5. Flying with low Reynolds number
If the bird is very small, then at the usual speeds will be flown with very small
Reynolds number. The drag of the bird then has about the same size as its weight
force. It could also be described as flying against drag
. Already K. Lorenz
has noticed that small birds are flying differently than large ones. A flying
with lift or a gliding flight with a useful glide angle can hardly be achieved
with this configuration (e.g. sparrow). Swallows are certainly an exception.

Figure 6
Total forces in level flight of small birds
They are flying with low Reynolds number (with small dimensions and moderate flight speed) and consequently with relatively high drag. Only the flying with thrust is used. The glide angle is poor in this configuration.
Surely this is also mostly the gait or way of flying of ornithopters with membrane flapping wings. Not only because of low Reynolds number their drag is very high. Their load-bearing capacity is small. In contrast the thrust forces of membrane flapping wings are relatively big.
Under these conditions lift generation becomes a secondary task. But obviously the possibility exists that the wing downstroke alone is sufficient for lift and thrust generation. For its small birds use very different wing shapes during up- and downstroke. For example some of them almost fold up their wings during the upstroke completely (for the corresponding ring-vortex, please look at Basic-Gaits Fig. 1). With all these applied sophistications it helps in many ways, but technically they are likely hard to copy.
6. Gait change to approach for landing
One can distinguish at least two variants of approaches for landing. After the cruise flight either the gliding flight is used for a short time and only then a short stationary flight. Or the transition to the stationary flight takes place right away. The latter method is described below. The stationary flight is a flying with thrust.
The approach for landing begins without interruption of the flapping motion with the braking of the locomotion. For this purpose, the bird slowly erected its body. The wing twisting and the drag increase. Also, the body of the bird no longer lies in the direction of flight. The speed of flight becomes smaller, but, with the square of the speed also the lift. This is initially compensated by the increasing of the angle of attack.
With the erecting of the bird body also the stroke axis is directed upwards. The lift which is always perpendicular to the stroke axis, thus, is turned from the vertical. This additionally loses its load-bearing capacity. A further slow erecting of the bird, however, only takes place in theory. In practice everything goes very fast now.
The thrust must replace the lift more and more. For this the flapping frequency and the stroke angle are strongly increased. Due to the high flapping frequency, the lift force in the outer wing area is increasingly aligned in the direction of thrust. This is also at the expense for the generation of lift.

Figure 7
Unattainable approach for landing
It is very unlikely that lift and thrust can become so large at the same time.
The too large representation of the lift force was indicated by an interruption in the vector.
In the example of Figure 7 the maximum alignment of the body is nearly reached. However, in the shown way of flying the thrust would have to be more than quadrupled compared to the cruise flight in Figure 3. In addition, the lift as an essential part of the load-bearing force cannot be maintained in the shown size. Thus, such a combination of forces cannot occur at all.
In order to avoid this configuration of force and nevertheless generate enough load-bearing force, the transition from flying with lift to flying with thrust must go very quickly. Only the braking from cruising flight may take a few seconds, particularly in large birds. But as soon as the bird can no longer hold the altitude begins flying with thrust. In this way a flying with very low forward speed is made possible. However, this is very energy-sapping. For a precision landing, however, as a rule are required only a few wing beats.
Gait change to approach for landing
-

- Figure 8

{kind=link}
{kind=link}
Transition from flying with lift to flying with thrust
The middle flight situation where lift and thrust would have to be very large at the same time is skipped.
For ornithopters in cruise flight it is very difficult to realize the temporally coordinated erecting of the fuselage and the simultaneous matching modification of the wing twisting. For them a transition from cruise flight to an accurate smooth precision landing is certainly too difficult for a longer period of time.
7. Conclusion
In flapping flight very diverse combinations of forces are applicable. But the ornithopter must comply with the respective requirements. That one and the same aircraft handles all combinations of forces is not even known in birds with their very variable wings.

- augmented (0.5 MB)
Gull in a gusty wind
and with changing wing stroke amplitude. Due
to the wing tips being bent up in the downstroke the tip vortices are accelerated
outwards. The resulting seeming enlargement of the wing span effects a decrease
of the induced drag.
Since the wings of ornithopters are only a little modifiable in flight so far one should determine the way of flying one aims with it before making. A gait change of ornithopters is still rather the exemption.
8. Related Links
- Tyson L. Hedrick, Bret W. Tobalske and Andrew A. Biewener,
Estimates of circulation and gait change based on a three-dimensional kinematic analysis of flight in cockatiels (Nymphicus hollandicus) and ringed turtle-doves (Streptopelia risoria)
(2002), Fig. 1.
https://jeb.biologists.org/content/205/10/1389 - Biologie - Die Wissenschaft vom Leben / Lexikon / Fliegen (Fortbewegung),
chapterVogelflug
https://www.biologie-seite.de/Biologie/Fliegen_(Fortbewegung)