
Ornithoptermodelle EV1 bis EV3
1. Ornithoptermodell EV1

- Erstflug
- Spannweite
- Gewicht
- Flügelfläche
- Flächenbelastung
- max. Flügeltiefe
- Schlagperiode
- Schlagwinkel
- 1975
- 2,90 m
- 5,4 kg
- 1,02 qm
- 5,3 kg/qm
- 0,44 m
- 0,8 s
- 60 Grad
1.1 Flugbilder vom EV1

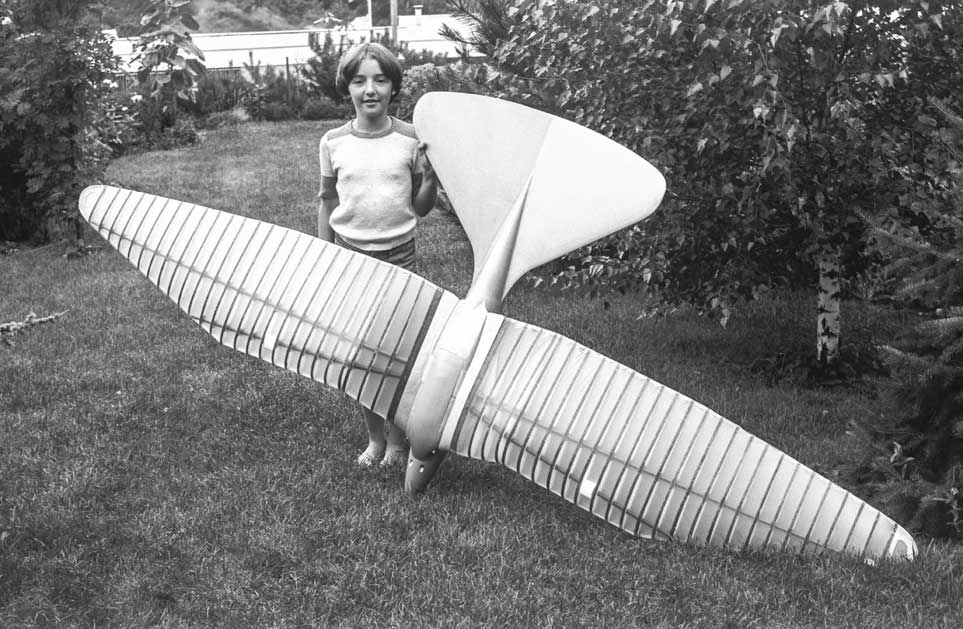
Der erste fliegende Elektro-Vogel
(Elektro-Vogel Nr. 1)
Die inneren Armflügel wurden aktiv vom Antrieb gedreht und verwunden. Die äußeren Handflügel sollten sich zusätzlich aeroelastisch verwinden.

EV1 im Kraftflug


EV1 im Gleitflug
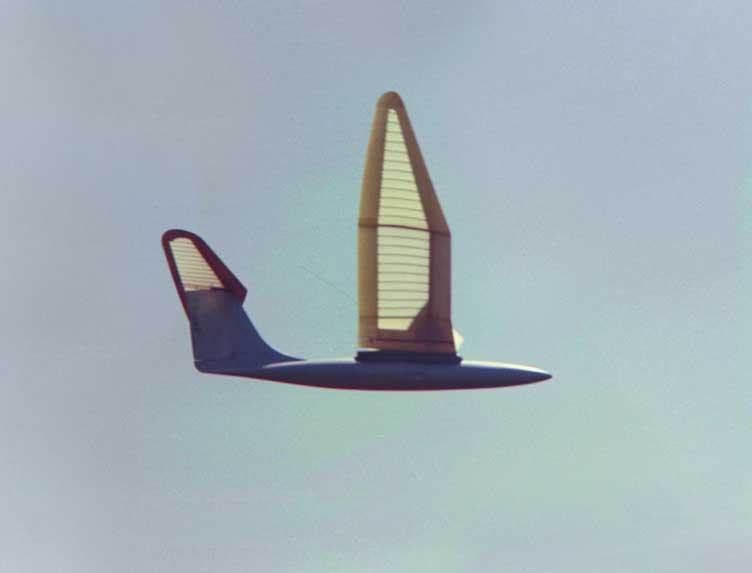
Flügel in der oberen Endlage
Die für den Kraftflug erforderliche Verwindung längs des
ganzen Flügels war leider viel zu gering. Sie wurde auch durch
die stabile, breite Endleiste sehr erschwert.

Flügelverwindung beim Abschlag
Durch die hohe Flächenbelastung fliegt das Modell relativ schnell.
Das hat den Vorteil, dass die Flügelverwindung nicht groß sein
muss.
1.2 Rumpf-Herstellung

Länge 1,6 m, Außendurchmesser 147 mm, Rumpfwand ca. 10 mm dick, hergestellt aus Hartschaumringen, überzogen mit glasfaserverstärktem Polyester.
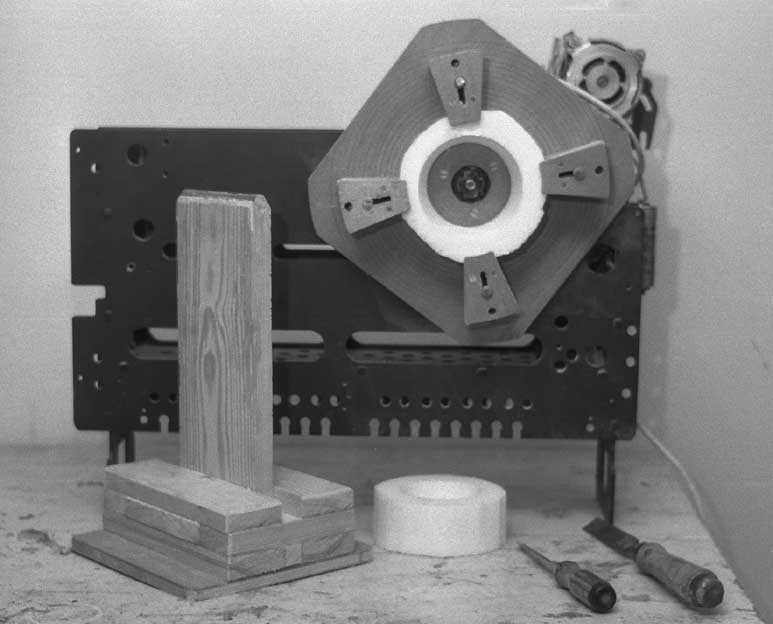
Herstellung der Hartschaumringe
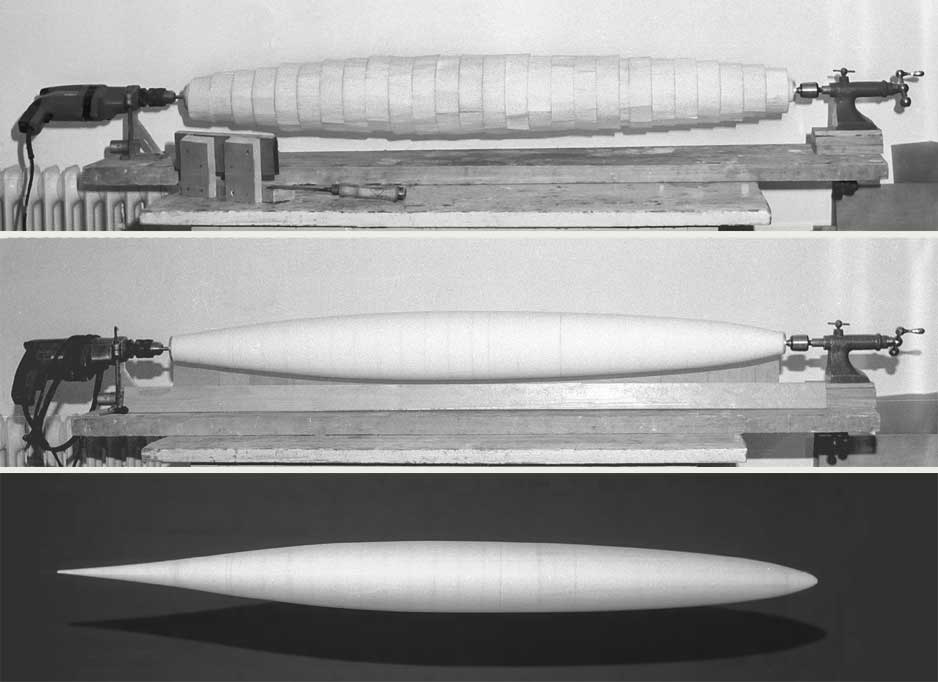
Herstellung der Rumpfspindel

Der EV1 arbeitete mit Flügelwurzelverdrehung.
Im Innern der Flügelzungen war jeweils eine Mechanik eingebaut.
Damit wurden die Flügelhandgelenke in der Mitte der Flügelhalbspannweite
zusätzlich gedreht.
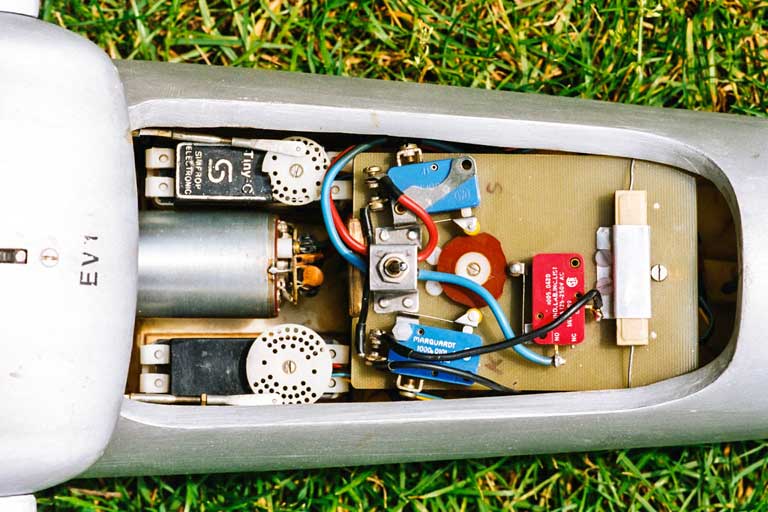
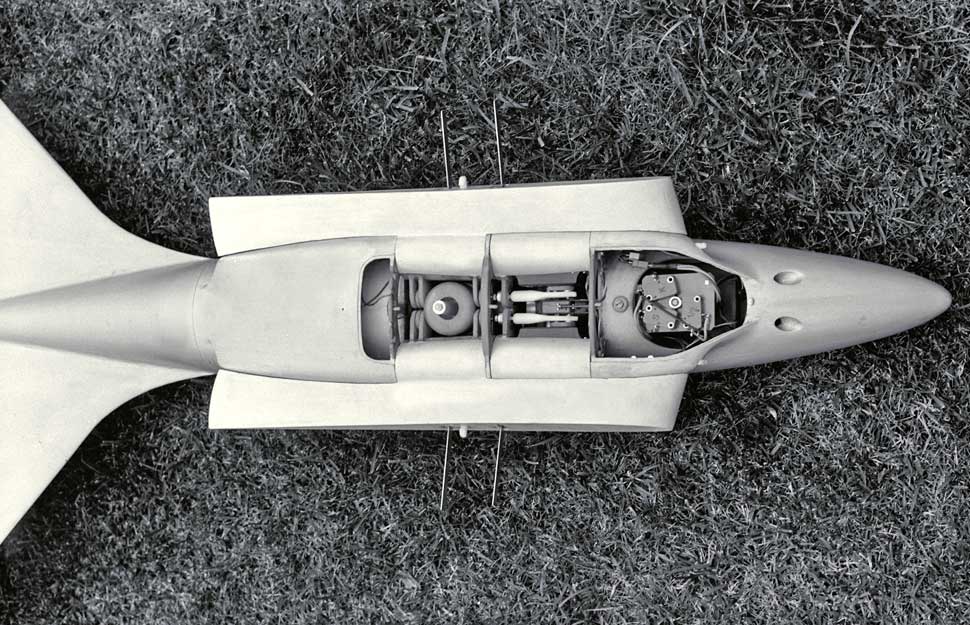
Man sieht links den Antriebsmotor und die Servos für die Modellsteuerung und rechts den Mikroschalter für die Drehrichtungsu kehr und der Widerstand für den Sanftanlauf
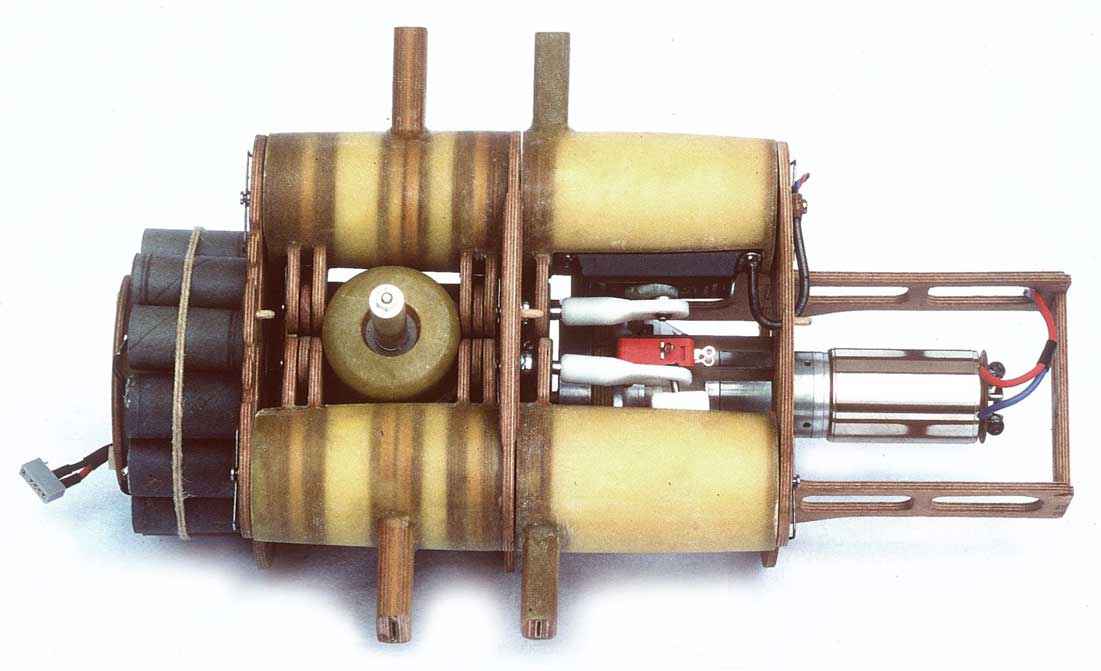
1.3 Antriebsmechanik des EV1

Man sieht auf diesem Bild:
Links
- Die Klampe zur Fixierung der Schnur vom Flaschenzug, zum Spannen der Gummistrang - Kompensationsfeder im hinteren Rumpfteil (siehe nächstes Bild).
- Die Stahldrähte zwischen dem Flaschenzug und dem Winkelhebel. Letzterer drückt die Hauptkreuzschleife nach oben bzw. den Flügel nach unten.
Mitte
- Die Halter für die Führung der Kreuzschleifen.
Rechts
- Die Gelenkstangenköpfe der Steuerkreuzschleife für die Flügelwurzelverdrehung.
- Unterhalb davon ist ein bisschen die Antriebseinheit zu sehen und rechts davon der blaue Mikroschalter für die Gleitflugstellung.
Die Gelenkstangenköpfe der Hauptkreuzschleife greifen im Innern der Hauptholm-Rohrenden an.

Durch die Antriebsmechanik mit einer Kardankurbel wurde der Anstellwinkel des Schlagflügels durch aktive Drehung der Flügelwurzel an die während der Schlagbewegung sich ändernde Anströmrichtung angepasst. Das entsprach der Schlagflügeltheorie von E. v. Holst. Aus heutiger Sicht sollte der Anstellwinkel an der Flügelwurzel beim Aufschlag zwar vergrößert, beim Abschlag aber nicht verkleinert werden (siehe Aufsatz Auftrieb beim Flügelaufschlag, Version 10.1, PDF 1,0 MB).
Innerhalb des Flügels ließ sich die Bewegung der Flügelwurzelrippe gegenüber dem Rumpf weiter zur aktiven Verwindung des Armflügels nutzten. Der Handflügel sollte sich dann zusätzlich aeroelastisch verwinden.

Hier sieht man den Flaschenzug zum Spannen der Gummifeder. Deren
Kraftwirkung liegt in der Größenordnung der Auftriebskräfte
im Gleitflug. Die zum Schluss eingesetzten 28 Gummistränge
ergaben eine Zugkraft dieser Kompensationsfeder
von etwa 500 N.
Technische Zeichnung
mit einem Längsschnitt durch den Rumpf
und durch die Antriebsmechanik des Ornithopters EV1.
1.4 Video vom EV1 (1975)
Von den EV-Ornithoptermodellen wurden nur sehr wenige 8 mm-Filme aufgenommen. Mangels Auswahl ist die Bildqualität der hier gezeigten Streifen teilweise schlecht. Man erhält aber damit trotzdem einen Eindruck von der Flugweise der Modelle.

Die Prüfung aller Antriebsfunktionen war nur bei vorhandenem Flügelauftrieb möglich. Daher waren zuerst Laufversuche erforderlich. Insbesondere die Umschaltung zwischen Gleit- und Kraftflug wurde dabei getestet.
1. Flug:
Es ist der Start zum ersten Kraftflug eines elektrisch angetriebenen Schlagflügelmodells zu sehen.
2. Flug:
Auch der zweite Flug dauerte nur wenige Flügelschläge.
Beide Flüge sehen im ersten Moment etwas kläglich aus. Trotzdem war danach die Erleichterung groß. Die senkrechten Rumpfpendelbewegungen waren ausgeblieben. Außerdem funktioniete der neuartige Kardankurbelantrieb bestens. Seine Umschaltung zwischen Kraft- und Gleitflug arbeitete einwandfrei. Es konnten weitere, kurze Flüge durchgeführt werden.
| Download |
640 x 480 mp4 (1,9 MB) |
480 x 360 mp4 (1,0 MB) |
320 x 240 mp4 (0,5 MB) |
2. Ornithoptermodell EV2

- Erstflug
- Spannweite
- Gewicht
- Flügelfläche
- Flächenbelastung
- max. Flügeltiefe
- 1976
- 2,96 m
- 5,4 kg
- 0,92 qm
- 5,9 kg/qm
- 0,42 m
Die aktive Flügelverwindung erfolgte durch getrennte, phasenverschobene Antriebsanlenkung von Haupt- und Hilfsholm.
Zur Flügelbespannung wurde erstmals die elastische Folie vom Typ
Platilon U 04
verwendet, Dicke 0,03 und 0,05 mm (Datenblatt siehe
weiterführender Link der Seite Gelenkschlagflügel
).

Draufsichtvergleich EV1 - EV2
Haupt- und Hilfsholm wurden über zwei Flachstähle getrennt angesteuert (siehe Verwindung durch Hilfsholm-Schlagbewegung). Vorne kann man die Mikroschalter für die Umsteuerung zwischen Gleit- und Kraftflug sehen. Das hintere Rumpfende konnte für den Akkuwechsel abgenommen werden.

Der Rumpf wurde wie bei EV1 aus Rohacellringen hergestellt und mit glasfaserverstärktem Kunststoff überzogen.

Flügelverwindung
2.1 Antriebsmechanik des EV2
Hinten sieht man die Akkus und den Federtopf der senkrecht angeordneten Stahl-Kompensationsfeder
Antriebsmechanik, Ansicht von unten
Es wurde die Kardankurbel mit Gleitflug-Kraftflug-Umschaltung
durch Drehrichtungsumkehr wie beim EV1 verwendet.

Mit den Servos in den vorderen Flügelanschlusswalzen konnte die Flügelverwindung beeinflusst werden.
Einzelteile der Mechanik
Federdaten: d = 4 mm, Dm = 40 mm,
R = 3,26 N/mm, Fmax = 536 N, G = 184g

Zeichnung (Längsschnitt) von der Antriebsmechanik
Beim EV2 boten die Schlagflügel gute Möglichkeiten für starke Verwindungen. Trotzdem gab es kein brauchbares Flugergebnis. Lagerspiele und die unerwünschte Elastizität der Holme spielten bei der Flügelverwindung eine zu große Rolle. Das Einstellen, Halten und Reproduzieren eines bestimmten Anstellwinkels im Flügelspitzenbereich war praktisch nicht möglich.
Das angewendete Prinzip der Verwindung
durch Hilfsholm-Schlagbewegung
ist nach den bisherigen Erfahrungen
für Ornithopter mit großer Spannweite ungeeignet. Im Übrigen
wurden aber beim EV2 gute Fortschritte bei der Konstruktion
erzielt (siehe Bericht in Kapitel 4).
3. Ornithoptermodell EV3
Keine Bilder
Der EV3 ist über die Konstruktionsphase nicht hinaus gekommen (beendet 1978). Es existieren nur Planunterlagen.